|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Multi-cycle control:
microprogram |
|
|
|
|
|
|
|
Disadvantages of FSM |
|
|
|
Very complex for 100
instructions, even with MIPS architecture |
|
|
|
Instructions take 1-20
clock cycles |
|
|
|
Large number of states:
100s or more |
|
|
|
Microprogram: another level of abstraction, simplifies control design |
|
|
|
|
Each microinstruction
specifies the set of control signals in a given state |
|
|
Executing a
microinstruction: assert the specified control signals |
|
|
|
Sequencing: |
|
|
|
|
|
Unconditional: go to
single next state |
|
|
|
Conditional: next state
depends on input |
|
|
|
|
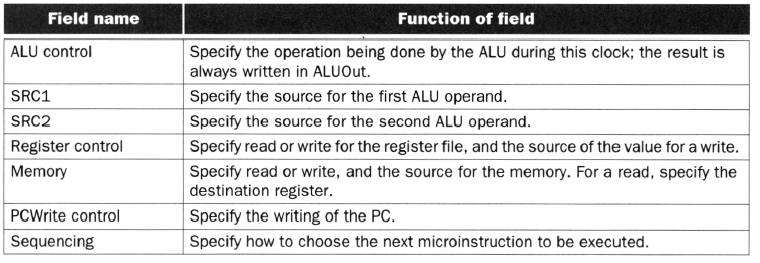
Microinstruction format |
|
|
|
|
|
Series of fields: each
field specifies set of control signals |
|
|
|
|
Signals never asserted
simultaneously may share same field |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fig. 5.44 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|