|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
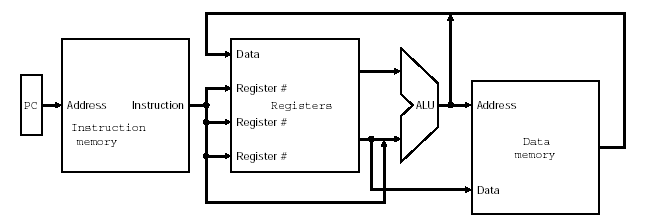
Single-cycle datapath |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fig. 5.1 |
|
|
|
|
|
|
|
|
Single-cycle
implementation |
|
|
|
|
|
Assume each instruction
is executed in 1 clock cycle |
|
|
|
|
|
Each component (memory,
ALU, etc.) can be used only once |
|
|
|
|
|
Reason for assuming
separate instruction and data memories |
|
|
Advantage: simpler to
design |
|
|
|
|
|
|
Disadvantage: speed of
machine is determined by time for longest path |
|
|
|
Memory access is
much slower than register access, |
|
|
|
|
|
|
but most instructions use
only registers |
|
|
|
|
|
Better: each instruction
type can take different number of clock cycles |
|
|
Common elements for all
instructions |
|
|
|
|
|
Instruction fetch, PC
update |
|
|
|
|
|
Access 1 or 2 registers |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|